The arm assembly
This part was done well before the bicep assembly which I have already done a blog post about but I just didn't want to risk being accused of being organized. All told the forearm and hand assembly was quite an adventure and actually continues to be interesting. The main reason for all that is that this was the first part that I tried to print and to assemble and as such has been loaded with errors that I had to correct.
This picture show the arm, wrist and hand in the process of connecting the strings. Actually the second time I did the strings. The first time was with some waxed cord that I found at the hardware store before I had ordered the 200 lb test fishing line. It didn't work very well, hence the change. The strings lay flat across the wrist like that because I put a piece of double sided tape there in order to keep the strings in order as I pulled them in. Paper plates are an important part of my accessories. I use them for almost everything.

A detail shot of the forearm with the servo cable for the wrist servo.

This is a shot of the arm and hand when I was partway through the process of attaching the strings to the servos and the ugly knots that I was making. I was making tighter and tighter knots to adjust for slack in the strings. What I didm't realize at the time was that I had not paid enough attention to the routing of the strings. I made two important mistakes: I had gotten the strings for different fingers wrapped around those for other fingers and I had not paid enough attention to getting the pull strings on top of all possible passageways and the return strings on the bottom. The combination of these two things made trying to get proper tension in all the strings a real mess and trying to get all the fingers to pull and return mostly impossible. A bit later in the process I pulled and re-strung all the strings getting them all straightened away. I actually untied all those ugly knots using a magnifying glass and tweezers. Like I said, doing this process was a real adventure.
By the way, I had the servos connected to a Raspberry Pi by way of an Adafruit 16 servos board. The Pi that I was using was actually the control for a wheeled robot that I was playing with.

Here is an overhead shot.

A shot with all the strings attached. If you look closely you can see the confusion of strings as they enter the wrist. The problem may not be obvious unless you have tried to do the strings once. Also, you can see that three of the fingertips are pulled up. This is evidence of the problems with string tension due to tangling.

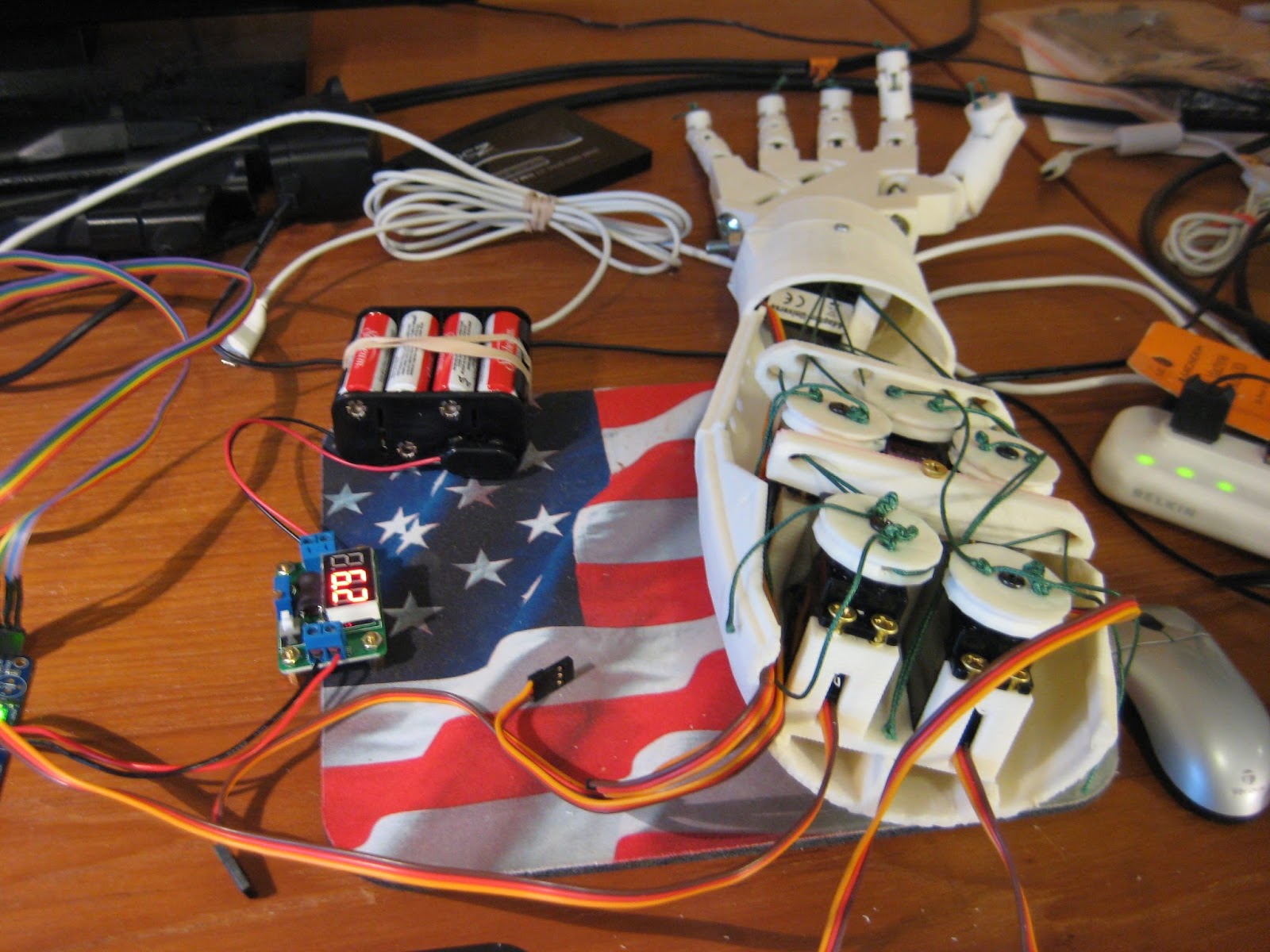
A shot of the arm during testing. The small thing with 6.2 showing is a step down voltage regulator running on the battery pack of 8 cells giving 12 volts. The index finger is flexed.
The arm assembled with Joe Walsh on the tube. At this point in the process I had already restrung all the fingers and tested the whole arm. As I discovered later there were more errors during this process that would add to my later enjoyment.

I may not sound like it at times but I am really enjoying this process.
Next the arm, shoulder and torso assembly. And the other arm that is keeping the printer warm in my absence.
Hi Morris,
ReplyDeleteGreat work here.
I wanted to thank you for your new donation!
I was very surprised I thought it was a mistake by paypal or someting.
I have made progress with finger. I modified again the casing and used a planetary motor and designed bevel gears instaed of a (almost impossible to print) wormgear.
I see you have done a lot of progress on your side and your prints are looking awesome!
There is new sketchs on the blog for a better comprehension of most parts. Look in Assembly sketchs
Keep it up!
Hi Gael,
ReplyDeleteYou are welcome. InMoov is an important project and I just want to support it a little.
I have done quite a bit since this post but I have not gotten around to posting in the blog. I have been recently working on the left arm but it is not together yet because I am re-arranging the servo bed in order to mount a servo control board between the servo bed and the elbow cap. I'm not very experienced with creating and modifying printed pieces so it is a slow process.
Later,
Morris